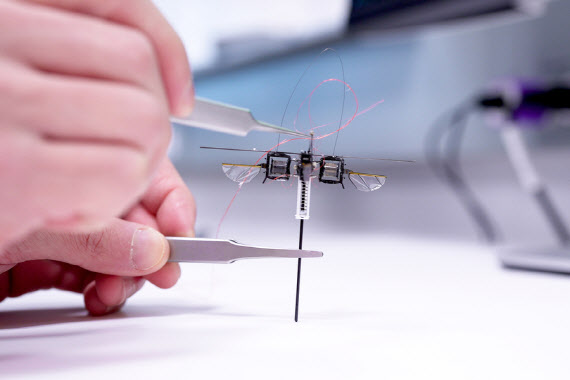
미국 매사추세츠 공과대학(MIT) 연구진이 개발한 곤충 모양의 초소형 점프 로봇.(사진=MIT News)
흡사 잠자리 형태를 띤 이 점프 로봇은 성인 엄지손가락보다 작고 페이퍼 클립보다 가볍게 제작됐다. 접지면 반발력을 이용하는 스프링 다리와, 날개 4개로 방향을 제어하는 모듈을 가지고 있다. 지진 후 붕괴된 건물 등에서 생존자를 찾기 위해 기존 로봇이나 드론이 접근할 수 없는 깊숙하고 비좁은 곳까지 들어갈 수 있다.
해당 MIT 연구진은 점프 로봇이 도약을 통해 에너지 효율성 측면에서 많은 이점을 제공할 수 있다고 설명한다. 지면에 떨어진 높이에서 발생하는 위치에너지가 로봇이 낙하하면서 운동에너지로 변환한다.
이 운동에너지가 지면에 닿으면 다시 위치에너지로 변환되고, 상승하면서 다시 운동에너지로 변환된다. 이 과정의 효율성을 극대화하기 위해 로봇에 볼펜 스프링 구조와 유사한 압축 스프링으로 만든 탄성 다리를 장착했다. 로봇이 지면에 닿으면 스프링이 하강 속도를 상승 속도로 변환한다.
지면과 접촉할 때 손실되는 소량의 에너지를 보상하고 균형을 유지하기 위해 곤충 날개 모양으로 펄럭이는 모듈을 함께 활용한다. 날개는 부드러운 액추에이터(구동기)와 인공 근육으로 이뤄져 지면과의 반복적인 충돌에도 손상 없이 견딜 수 있는 내구성을 갖췄다.
로봇이 점프하면 공중을 활공하면서 탄도 궤적을 따라간다. 궤적 정점에서 로봇은 착륙 위치를 추정하고, 목표 착륙 지점을 기준으로 컨트롤러가 다음 점프를 위한 이륙 속도를 계산한다. 공중에 떠 있는 동안 로봇이 날개를 펄럭이며 방향을 조정하고 적절한 각도와 축으로 지면에 닿을 수 있도록 움직이는 구조다.
연구진은 MIT 소식지를 통해 “곤충 모양 점프 로봇의 곡예비행을 시연하며 민첩성을 입증했고, 공중 드론에 뛰어올라 협동 작업에 유용할 수도 있다”며 “앞으로 로봇이 실험실 밖에서 자율적으로 점프할 수 있도록 배터리와 센서 및 기타 회로를 설치하고 무거운 짐을 운반할 수 있는 기능을 탑재할 계획”이라고 밝혔다.

국내 연구진이 개발한 초소형 소프트 로봇 그리퍼.(사진=과학기술정보통신부)
2022년 조진한 고려대 교수 연구팀과 고제성 아주대 교수 연구팀은 고전도·고신축성 하이드로젤 전극을 제작할 수 있는 기술을 확보해 고성능·저전력 연성 구동기와 초소형 수상 로봇을 개발했다. 하이드로젤은 기능성과 자극 응답성이 우수해 차세대 초소형 로봇 구동기 핵심 재료로 주목받는다.
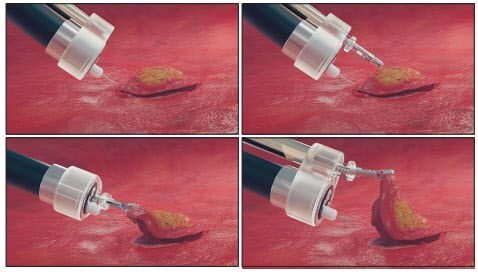
고려대 안암병원 연구진이 개발한 초소형 로봇 내시경 기기가 암 병변을 제거하는 모습.(사진=고려대학교 안암병원)
이 밖에도 지난해 국방기술진흥연구소는 LIG넥스원, 서울대, 한국전자통신연구원(ETRI), 한국과학기술원(KAIST) 등과 함께 ‘초소형 지상로봇 군집운용 통제기술 무기체계 패키지형 핵심기술 과제’에 착수했다. 개미나 벌 같은 곤충 등 초소형 생체를 모방한 기술을 로봇에 적용해 군집으로 운용하는 것이 사업 목표다.