데니스 홍 미국 캘리포니아대 로스앤젤레스(UCLA) 기계항공공학과 교수 연구팀 로봇연구소 로멜라(RoMeLa)는 29일(현지시간) 오픈소스 덱스터러스 로봇손 플랫폼 ‘마이더스 핸드(MIDAS Hand)’를 공개했다.
마이더스(MIDAS)는 모듈형·저임피던스·다이렉트 드라이브·인간형 구조·센싱 기능을 갖춘 로봇 손이라는 의미를 담았다.

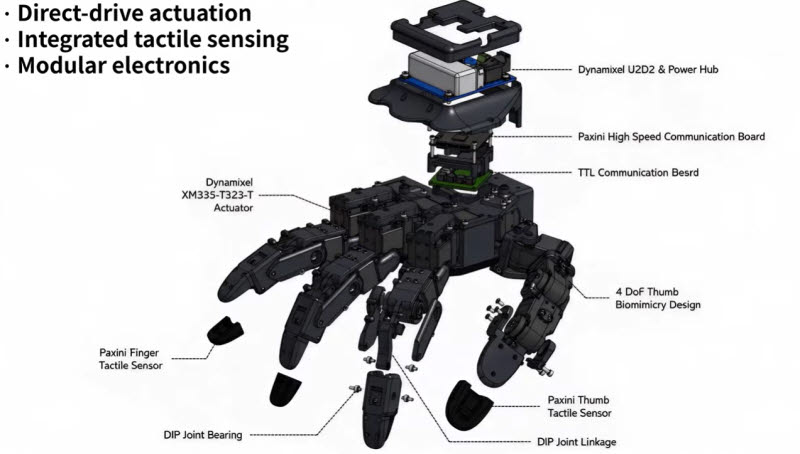
로멜라 연구소의 오픈소스 덱스터러스 로봇 손 플랫폼 ‘마이더스 핸드(MIDAS Hand)’ (사진=로멜라)
공개 자료에 따르면 마이더스 핸드는 총 16자유도(DOF), 13개 능동 자유도를 갖췄다. 손가락 구동에는 로보티즈(108490)의 로봇 전용 액추에이터 ‘다이나믹셀(DYNAMIXEL) XM335-T323-T’ 13개가 사용됐다. 3축 촉각 센서 택셀 283개가 적용됐으며, 본체 무게는 약 700g이다.
가장 큰 특징은 가격과 개방성이다. 로멜라가 제시한 부품표(BOM) 기준 전체 제작비는 약 3000달러(약 452만원) 수준이다. 기존 덱스터러스 이 고가 장비 중심으로 연구기관이나 대기업에서 주로 활용돼 온 것과 달리, 마이더스 핸드는 400만원대 제작비와 오픈소스 구조를 앞세워 로봇 손 연구의 진입장벽을 낮췄다는 평가가 나온다.
로멜라는 마이더스 핸드의 CAD 파일, 3D 프린팅용 파일, 부품 목록, 조립 문서, 무조코(MuJoCo) 시뮬레이션 모델, 제어·리타게팅·텔레오퍼레이션용 소프트웨어 저장소를 공개했다. 프로젝트 페이지에는 도구 조작과 파지, 손 안 조작, 촉각 센서 반응, 비전 기반 하드웨어 리타게팅, 원격조작, 하드웨어 반복성 테스트, 시뮬레이션 데모도 포함됐다.
로보티즈가 선보인 마이더스 핸드 제작용 핵심 부품 번들에는 다이나믹셀 스타터 키트와 다이나믹셀 XM335-T323-T 13개, 로봇 케이블-X3P 180mm 10개입 1세트가 포함된다. 판매 페이지 기준 예상 리드타임은 약 4개월이다.
로멜라 연구소의 오픈소스 덱스터러스 로봇 손 ‘마이더스 핸드(MIDAS Hand)’ (사진=로멜라)
업계에서는 로봇 손이 휴머노이드와 피지컬 AI 구현의 핵심 부품으로 꼽히는 만큼, 개방형 연구 플랫폼 확대가 생태계 확장으로 이어질 수 있다고 본다.
로봇 손은 손가락 관절 구동, 촉각 센싱, 제어 소프트웨어, 조작 알고리즘이 함께 구현돼야 해 개발 난도가 높다. 마이더스 핸드는 하드웨어·소프트웨어·시뮬레이션 환경을 함께 제공해 연구자들이 같은 플랫폼 위에서 로봇 조작과 촉각 기반 학습 알고리즘을 검증할 수 있도록 했다.
다만 가반하중이나 최대 파지력 등 구체적인 힘 성능 수치는 확인되지 않았다. 로보티즈 판매 번들도 완성품 로봇 손이 아니라 핵심 액추에이터와 액세서리 중심 구성으로, 사용자가 추가 부품을 준비해 직접 조립해야 하는 연구·개발용 키트로 소개됐다.
데니스 홍 교수는 UCLA 기계항공공학과 교수이자 로멜라의 창립 디렉터다. TED 연사로도 알려진 그는 로봇 보행과 조작, 자율주행차, 휴머노이드 로봇을 연구해왔다. 공압식 로봇 손 ‘라파엘(RAPHaEL)’, 3족 보행 로봇 ‘스트라이더(STriDER)’, 시각장애인이 운전할 수 있는 자동차 등을 개발한 연구자로도 소개돼 왔다. 워싱턴포스트 매거진은 홍 교수를 ‘로봇계의 레오나르도 다빈치’라고 부르기도 했다.
로멜라는 휴머노이드 로봇과 로봇 메커니즘, 조작 기술 등을 연구하는 UCLA 연구소다. 홍 교수 연구팀은 DARPA 어번 챌린지에서 3위에 올라 50만 달러의 상금을 받았고, 국제 로봇 축구대회 로보컵에서도 휴머노이드 부문 우승 성과를 낸 바 있다.
로멜라는 마이더스 핸드를 시작으로 총 4종의 로봇 손을 순차적으로 공개할 계획이다. 첫 번째로 공개한 마이더스 핸드에 이어, 두 번째 모델은 특정 작업 수행을 겨냥한 대량생산형 로봇 손으로 개발하고 있다. 세 번째 모델은 고성능 로봇 손, 네 번째 모델은 기존과 다른 새로운 구성을 적용한 실험적 로봇 손이 될 예정이다.