리얼월드는 로봇 손 설계의 한계와 트레이드오프를 정리한 기술 리포트와 시각화 기능을 제공하는 웹사이트 ‘올핸즈업(All Hands Up!)’을 공개했다고 22일 밝혔다.
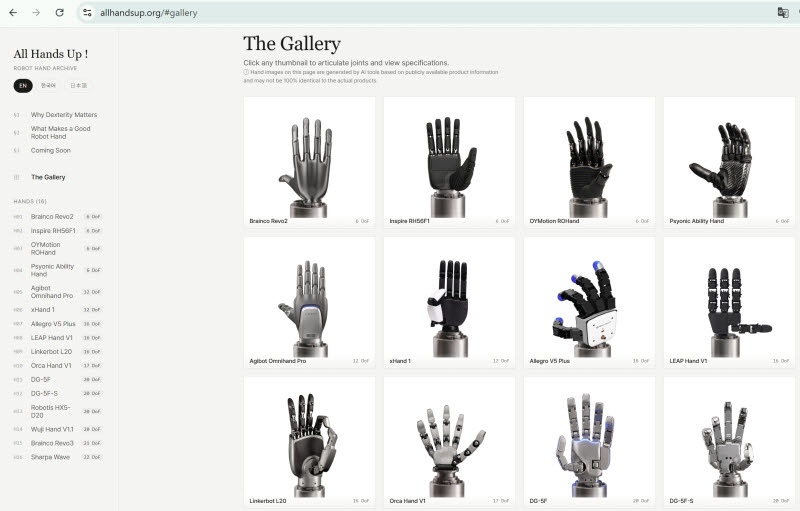
로봇 손 분석 플랫폼 ‘올핸즈업(All Hands Up!)’ (사진=리얼월드)
로봇 손은 피지컬 AI 구현의 핵심 요소로 꼽힌다. 다만 크기, 악력, 역구동성 사이의 구조적 상충 관계로 인해 모든 성능을 동시에 만족시키는 제품은 아직 없다고 회사 측은 설명했다. 크기를 줄이면 내부 구동 모터가 작아져 악력이 떨어지고, 반대로 힘을 키우기 위해 기어비를 높이면 외부 힘이나 충격에 유연하게 반응하는 역구동성이 낮아진다.
리얼월드는 실제 작업 수행 능력을 평가하기 위해 엄지손가락 가동 범위, 손가락 끝 마디 관절의 독립 구동 여부, 최소 파지 가능 직경, 손 외장 소재 마찰 특성 등 현장 운용 효율에 영향을 미치는 핵심 설계 변수를 정리했다. 자체 벤치마크 ‘덱스벤치(DexBench)’를 활용해 18종의 실세계 조작 작업을 기준으로 각 로봇 손의 특성과 한계도 분석했다.
리얼월드는 사용 목적에 따라 로봇 손 하드웨어를 이원화해 운용하는 전략도 제시했다. 현장 배포용은 실제 산업 환경을 고려해 경량성과 내구성을 우선한 구조가 적합하고, 학습 데이터 수집용은 AI 학습을 위한 미세 조작과 데이터 확보를 위해 높은 역구동성과 정밀성이 필요하다는 설명이다.
올핸즈업은 리얼월드가 평가한 로봇 손들의 URDF(로봇 기술 표준 포맷) 기반 인터랙티브 시각화 정보도 제공한다. 사용자는 별도 개발 환경 없이 웹 브라우저에서 마우스 조작만으로 여러 로봇 손의 관절을 직접 구동해 보고, 원하는 파지 형태 구현 가능 여부를 확인할 수 있다.
제품별 주요 사양 비교와 실제 로봇 시뮬레이션·개발에 활용할 수 있는 URDF 데이터도 함께 제공한다. 현재 플랫폼에는 10종 이상의 다관절 로봇 손 데이터가 수록돼 있다.
류중희 리얼월드 대표는 “매 분기 정기적인 콘텐츠 업데이트를 통해 최신 로봇 손 실증 데이터를 지속적으로 축적해 나갈 것”이라며 “제조사는 설계를 검증하고, 연구자와 산업 파트너는 로봇 손 도입을 위한 명확한 기준을 세울 수 있도록 공통의 기준점을 제공해 로봇 손 개발 생태계 발전에 기여하겠다”고 말했다.